

本稿では、AWS re:Invent 2025 の EXPO 内 Builder’s Fair で展示された内容の紹介になります。
具合悪くなったらまずビタミンをとれ!リンゴ食え!
内村でございます。
ただいま、アメリカはネバダ州のラスベガスで開催されている AWS re:Invent 2025 に参加しています。(2本目)
今年の re:Invent でも、開発者による手作りデモが集まる『Builder’s Fair』は大盛況でした。
本記事では、私が気になってたブース「Command a Robot with Amazon Bedrock」をレポートします。
内容についての諸注意
当記事は 2025年12月時点で調査した製品、サービス内容を記載しています。 最新の情報に関しては各種公式サイト、マニュアル等をご確認下さい。
当記事作成の際には十分注意しておりますが、内容に公式と相違がある場合は公式を優先とさせていただきます。
当記事内の試算およびそれに準ずる内容は、本資料の説明のために用いるものであり、不利益が生じた場合、一切の責任は負いかねますので予めご了承ください。
- 内容についての諸注意
- Command a Robot with Amazon Bedrock ブースとは
- ユースケース セキュリティ監視ロボットを自然言語で操作
- Bedrock+サーバレス+IoT Core のシンプル構成
- 興味を持ったポイント
- エンタープライズへの応用アイデア
- まとめ
Command a Robot with Amazon Bedrock ブースとは
AWS やパートナーが出展している EXPO には様々なブースがあります。 このブースの黒板には『Command a Robot with Amazon Bedrock』の文字。 ピンクのバルーンに囲まれた可愛らしい見た目とは裏腹に、内容はなかなか本格派です。

モニター内には「Bedrock Robot Control」という Web アプリが表示されています。 以下のコマンドが確認できます。
- Patrol in a square
- Find Person on Phone
- Patrol and Find Person
- Return to Start
テキスト入力欄に指示を入力し「Send Command to Robot」ボタンを押すと、後ろに置かれた小型ロボットが動き出し、指示に応じて巡回したり人を探したりします。
(執筆時にメインのロボットの近影を撮れてないことに気付き、意気消沈)
画面下部には ROS(Robot Operating System)のコード断片らしきテキストがリアルタイムで生成されており、Amazon Bedrock が「自然言語 → ROS コマンド」に変換している様子がわかります。
ユースケース セキュリティ監視ロボットを自然言語で操作
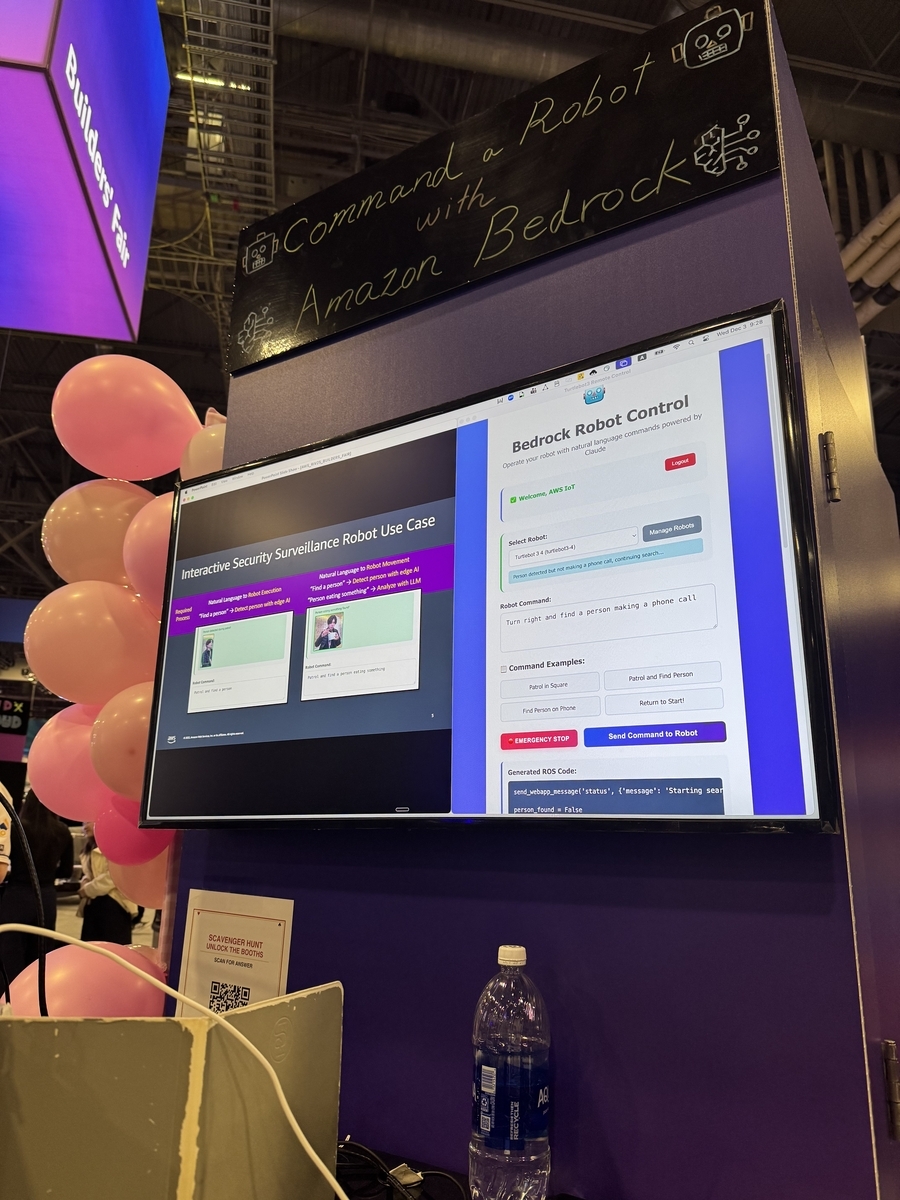
左側のスライドには『Interactive Security Surveillance Robot Use Case』と書かれており、想定ユースケースは「インタラクティブなセキュリティ監視ロボット」のようです。
- ロボットが施設内を巡回
- カメラで人や特定の行動を検知
- オペレーターは「自然言語で指示を出すだけ」
このシチューションで、
「右に曲がって、電話している人を探して」
「このエリアを四角形にパトロールして」
といった曖昧さを含んだ指示を LLM が解釈し、具体的な ROS コマンドとパラメータに落とし込んでくれるデモになっていました。
ロボット制御の専門知識がなくても『言葉でロボットを操れる』ことが、このデモの肝になっています。
Bedrock+サーバレス+IoT Core のシンプル構成
ブースではラミネートされたアーキテクチャ図も見せてくれました。
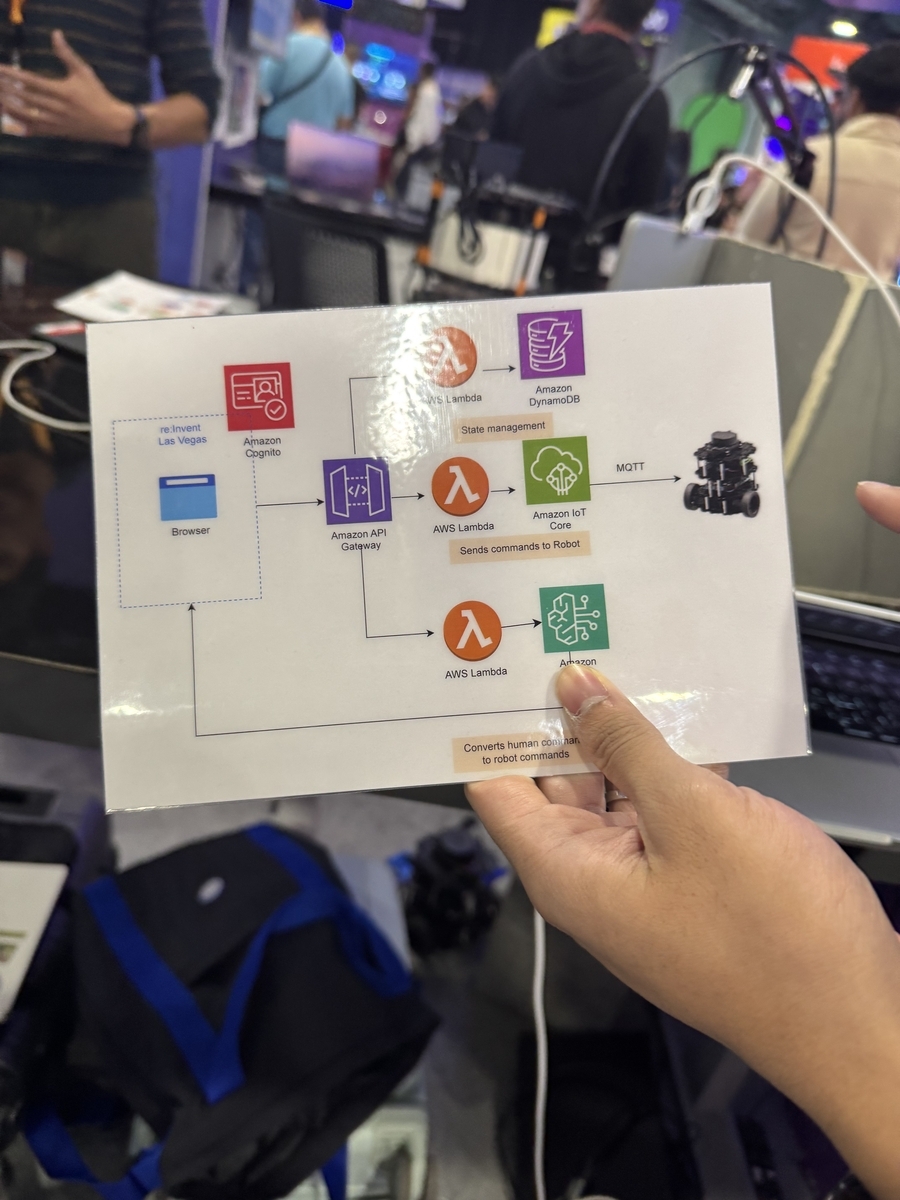
そこから読み取れた構成を整理すると、ざっくり次のような流れです。
- re:Invent 会場からブラウザで Web アプリにアクセス
- Amazon Cognito で認証
- Amazon API Gateway 経由で AWS Lambda を呼び出し
- Lambda が入力コマンドを Amazon Bedrock に渡して解釈させる 『人間の自然文 → ロボット用コマンド』への変換
- コマンドやロボットの状態は Amazon DynamoDB で管理(State management)
- 別の Lambda が Amazon IoT Core を通じてロボットへ MQTT で指示を送信
図の下部には『Converts human commands to robot commands』と説明があり、Bedrock が「自然言語コンパイラ」の役割を担っていることが強調されていました。
インフラ的はいかのようです。
- フロント:Browser + Amazon Cognito + Amazon API Gateway
- サーバレス:AWS Lambda(ビジネスロジック・Bedrock 呼び出し・ロボット制御)
- データ:Amazon DynamoDB(状態管理)
- デバイス連携:Amazon IoT Core(MQTT)
- 生成 AI:Amazon Bedrock
AWS らしいオーソドックスかつ拡張しやすい構成になっています。
でもお話し伺うと、AWS IoT Core のところはかなり作り込まれているとのことです。
興味を持ったポイント
デモを見ながら、個人的に面白いと思ったポイントを整理します。
『ROS の知識』と『現場の言葉』のギャップを埋めてくれる
ロボットを動かすには、本来は ROS や各種ミドルウェアの知識が必要です。
しかし現場でロボットを使いたい人(警備員・オペレーターなど)が、全員 ROS のトピック名や座標系を理解しているとは限りません。
このデモでは以下のステークホルダー と 役割 を考えました。
- 現場の人
- 「人が歩いているエリアを一周して確認して」と自然な言葉で指示
- システム側
- Bedrock がその意図を解釈し、「速度」「回転角」「停止条件」などを含んだ ROS コマンドに変換
生成 AI が「現場の言葉」と「ロボット制御の世界」を橋渡ししているのが印象的でした。
セーフティ機能も UI レベルで組み込まれている
画面には『EMERGENCY STOP』ボタンも用意されていました。
生成 AI による自律的な動作は便利な一方で、「万が一変なコマンドを出してしまったときに止められるか?」は現場ではとても重要です。
- AI がロボットを動かす
- でも、最終的な責任は人間が持つ
- そのための UI と制御フローを最初から設計に入れておく
この考え方は、エンタープライズ向けの導入にもそのまま応用できそうです。
エンタープライズへの応用アイデア
このデモはあくまで「監視ロボット」がテーマですが、構成そのものはかなり汎用的なので、いろいろな応用が想像できます。
- 工場・倉庫の自律走行ロボット
- 「この棚の前まで荷物を取りに行って」
- 「今日は 5 番ラインの周りだけ重点的に巡回して」など
- インフラ・設備点検ロボット
- 「3 階の電気室の温度を測って、前回より 5 度以上高ければ写真を撮って報告」
- 商業施設の案内ロボット
- 「エレベーター横までお客様を案内して、それから 1 階のフロアマップを表示」
共通しているとおもった箇所は以下です。
- 現場にいる人は「業務の言葉」で指示を出すだけ
- 生成 AI が、その裏側の複雑な制御や手順を肩代わりする
「人間が全部マニュアル操作するロボット」から、 「AI が翻訳して動かしてくれるロボット」へのシフトを、わかりやすく体感できるデモでした。
まとめ
『Command a Robot with Amazon Bedrock』ブースは、以下が印象的でした。
- 自然言語 → ROS コマンドの変換という分かりやすいテーマ
- Bedrock / Lambda / DynamoDB / IoT Core という実践的な構成
- かわいい見た目(ピンクの風船)とガチな中身のギャップ
AWS re:Invent では生成 AI の話題がどうしても「テキストやドキュメント」に偏りがちですが、 このブースは「物理世界のロボット」と組み合わせた事例として、 自分たちのお客様への応用をイメージしやすい内容だったと思います。
今後、社内検証や PoC のネタとしても面白そうなので、Bedrock+IoT の組み合わせはぜひ検討してみたいです。
現場からは以上です。