

コンニャクハ
トレーニングで走らせるDeepRacerをカスタムできるようになりました。
これまでもスピードとかステアリングとかは設定可能でしたよね。
それらに加えてカメラの1つ or 2つを選択できるようになったのとセンサーの有無が選択できるようになりました。リアルなデバイスの方も開発中のようです。
AWS DeepRacer Update – New Features & New Racing Opportunities

実際にやってみた
やってみました。
DeepRacerのコンソールの「Garage」からカスタムが可能です。

「Build new vehicle」からカスタムを始めます。

カメラの1つ2つが選択できます。またLIDARセンサーの有無を選択できます。
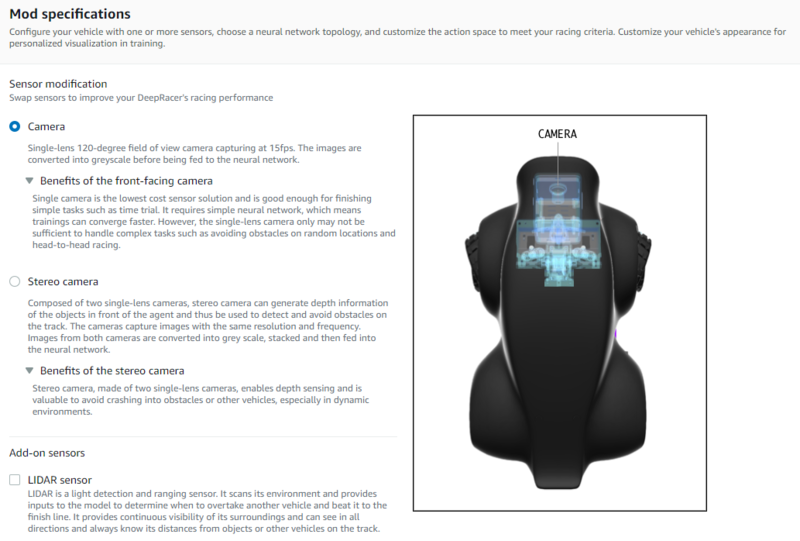
カメラにはそれぞれメリットがあるようです。
カメラ1つ
以下Amazon Translateで訳しました。
前面カメラの利点 シングルカメラは、最も低コストのセンサーソリューションであり、タイムトライアルなどの簡単な作業を終えるのに十分です。 これは、トレーニングがより速く収束することができることを意味し、単純なニューラルネットワークを必要とします。 しかし、単レンズカメラだけでは、ランダムな場所での障害物の回避や頭ツーヘッドレースなど、複雑なタスクを処理するには不十分な場合があります
つまりタイムトライアルならカメラ1つがよい、とのこと。
カメラ2つ
以下Amazon Translateで訳しました。
立体視カメラの利点 2台のシングルレンズカメラで構成されたステレオカメラは、深度センシングを可能にし、特にダイナミックな環境において、障害物やその他の車両への衝突を避けるために役立ちます。
つまり障害物レース・複数台のレースはこちらを使えよ、とのこと。
LIDARセンサー
LIDARセンサーってなんでしょうか。以下Amazon Translateで訳しました。
LIDARは、光検出および測距センサです。 それは、その環境をスキャンし、別の車両を追い越し、フィニッシュラインにそれを打つタイミングを決定するためにモデルへの入力を提供します。 それは、その周囲の連続的な可視性を提供し、すべての方向で見て、常にトラック上のオブジェクトや他の車両からの距離を知ることができます。
ふむ。そうですか。なるほど。
ニューラルネットワークの設定
なんと層の数を選べるようになってました。今のところ3層か5層のようです。

アクションスペースの設定
「Next」をクリックすると見慣れた画面になります。アクションスペースでステアリングとスピードを設定し「Next」。

そして。。。
次の画面ではやたらとDeepRacerが誇張されています。名前はもちろんですが、「Vehicle trim」で色を設定できます。これが個人的に一番のアップデートです。物理の方もスプレーで塗装して出場とかしていいんでしょうか??

いまのところ7色から選べます。

ワタシはオレンジがお気に入りです。
